These projects are the work from a course in Computational Robotics taken with
Professor Kostas Bekris
, head of the
PRACSYS
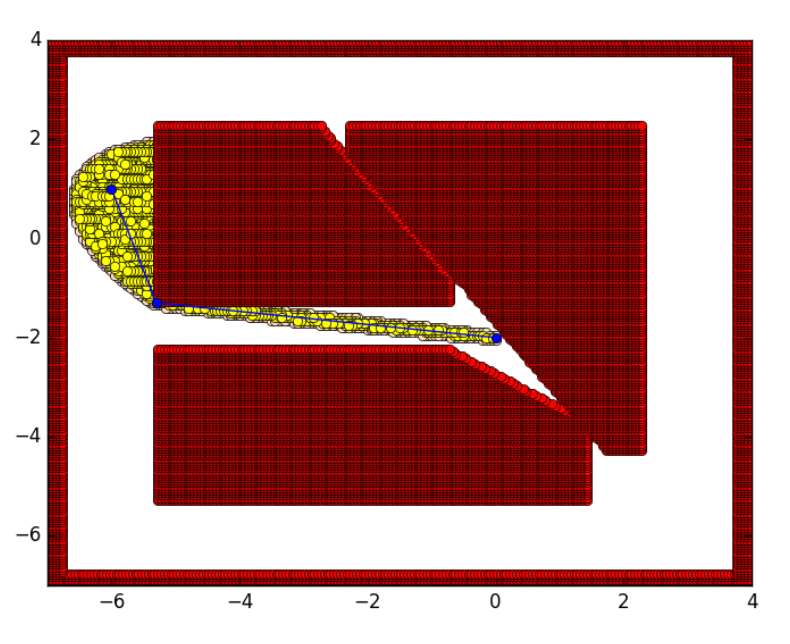
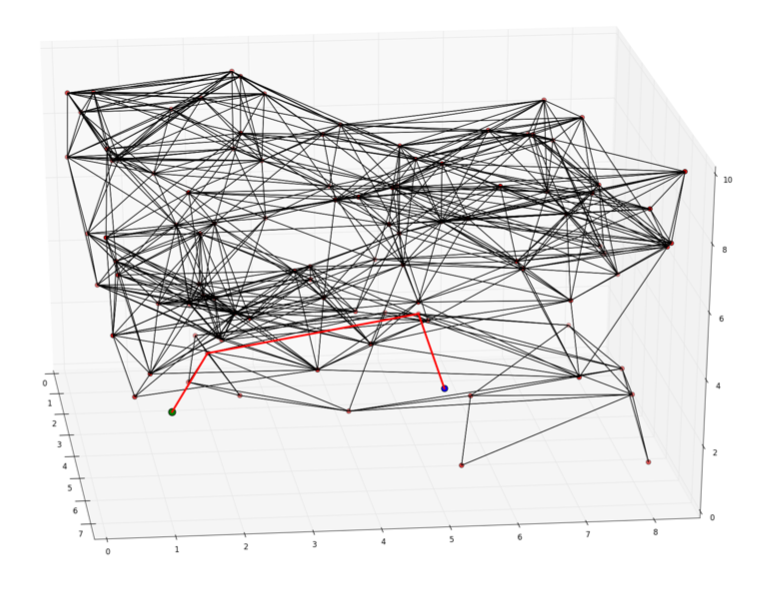
(Physics-aware Research on Autonomous Computational Systems) Lab at Rutgers University. The projects involve path planning algorithms implementations and simulations using tools like ROS and Gazebo on Ubuntu Linux. The first project deals with path planning of a Turtlebot (essentially a circular-shaped robot) in a 2D environment with polygonal obstacles. The second project deals with sampling-based motion planning using the Probabilistic Roadmap (PRM & PRM*) and Rapidly Exploring Random Tree (RRT) algorithms and simulating the path of motion in a Gazebo environment using the Ackermann model of a vehicle. The third project is an implementation of particle filtering for the localization part of SLAM. The projects can be found on
GitHub.