This research project comes from a place of deep interest in autonomous vehicles. After taking a class in vehicle dynamics I quickly fell in love with the complexity of the mere vehicles we see on the road everyday and it also stressed the need for a reduction in the over million number of fatalities caused by vehicular accidents every year. With this motivation, I teamed up with my vehicle dynamics professor and started an autonomous vehicle research project to delve deep into the highly proprietary technologies of autonomous vehicles to understand the current technology better and implement my own version or a recreation of the technologies. Combining my computer science and engineering mindsets, I began researching the technologies and quickly realized my goals for ths project which I have outlined below.
Originally I planned to engineer a deep learning algorithm to accomplish the feat and simulate it to test its accuracy, but I quickly told myself, "why stop there." This led me to find funding to obtian the hardware I need to add to a model vehicle which my professor has form previous projects to "create" this model autonomous vehicle. With this, I can test all the aspects of the algorithm in real life conditions and be able to present something tangible. See below for my specific goals. Currently, I would say I am in the design phase of the deep learning algorithm and have researched the specific hardware components that will make this possible. The hardware is also being funding by Aresty Research Center, so once the funding becomes available, I will have a working software to integrate with the parts ordered with this funding.
Specific Research Goals:
A. Current Technologies Research
I. Learn about what’s used by top auto manufacturers and other companies
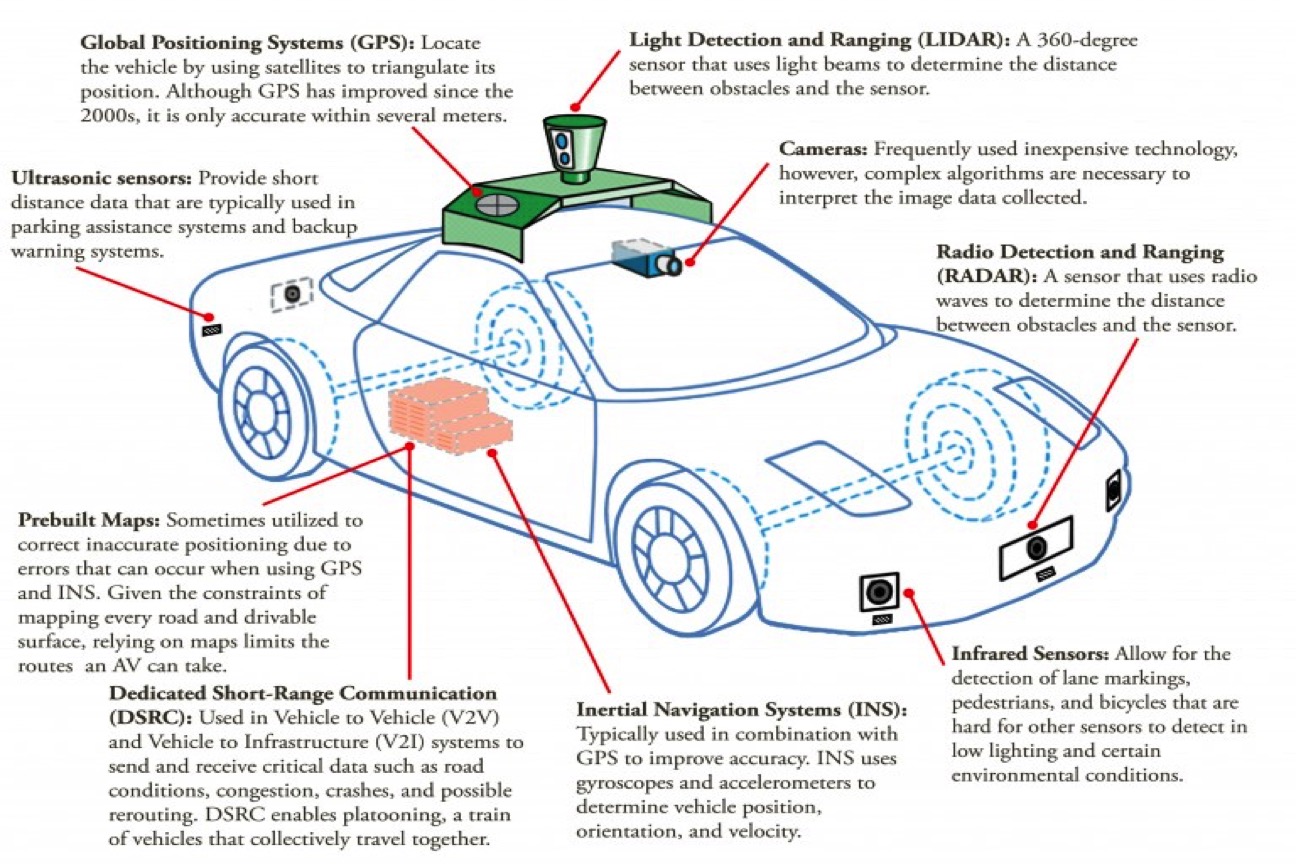
1. Hardware - sensors, cameras, etc
2. Software - machine learning models and algorithms
II. Find relevant research that is conducted in the field
III. Try mimicking software by creating and tweaking own neural network
IV. Research for sensory hardware and/or better solutions
B. Understand and attempt to rebuild current market’s best model and/or add on top of own model made with this
&
acquired knowledge
C. Integrate findings and research done by other Masters/PhD students working under Prof. Baruh
I. Conduct more research with other students
II. Use advanced models of vehicle dynamics (such as 3D model) to accurately train machine learning algorithms
III. Research on how an autonomous system can use the characteristics of a vehicle (understeer/oversteer,
understeer gradient, critical velocity, aerodynamics etc) to to its advantage to drive “better” (smoother ride,
less turbulent turns, etc) and more efficiently
D. List all possible test cases/corner cases involved with vehicles of all types
I. Brianstorm ways in which they can be accounted for
II. Categorize similar to Mobileye’s categorization of ~15 types of road structures
E. Create Deep Learning Algorithm
I. Establish architecture
II. Obtain various training sets
III. Train model & iterate training on difficiences of model
IV. Create decision-making alogrithm
F. Research & Order Hardware: sensors, IMU, GPS, onboard computer system
G. Implement hardware & software on model vehicle
H. Test the vehicle in controlled environments & improve the model based on findings
I. Go from there...